|
I'm a 3rd-year Ph.D. student at MIT's Computer Science and Artificial Intelligence Laboratory, where I am extremely fortunate to be advised by Vincent Sitzmann. Prevously, I completed my M.S. degree at CMU's Robotics Institute, where I had the distinct pleasure of being co-advised by Deva Ramanan and Jun-Yan Zhu. I graduated from KAIST with a B.S. in Mechanical Engineering. I also interned at Snap. My research interests lie at the intersection of machine learning and computer vision. I am especially interested in learning structure, such as 3D scenes and dynamics, from videos. Github / Google Scholar / Twitter / LinkedIn / Email |

|
|
|
|
Chonghyuk Song, Michal Stary, Boyuan Chen, George Kopanas, Vincent Sitzmann arXiv, 2025 code | project page | paper Generative View Stitching (GVS) is a non-autogressive sampling method for length extrapolation in video diffusion models. Unlike autoregression, GVS enables collision-free camera-guided video generation for predefined trajectories. |

|
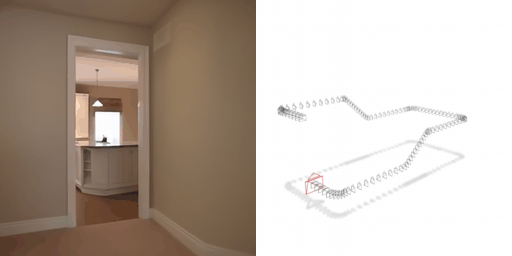
Chonghyuk Song, Gengshan Yang, Kangle Deng, Jun-Yan Zhu, Deva Ramanan ICCV, 2023 code | project page | paper Given a RGBD video containing deformable actors (top row), Total-Recon reconstructs the scene as a compositional 4D neural field, enabling extreme view synthesis from embodied views and bird's-eye views (bottom row). |
|
Taewon Min, Chonghyuk Song, Eunseok Kim, Inwook Shim ICCV, 2021 paper A novel positional embedding module that yields unprecedented improvements in the accuracy of existing GNN-based rigid point cloud registration methods. |
|
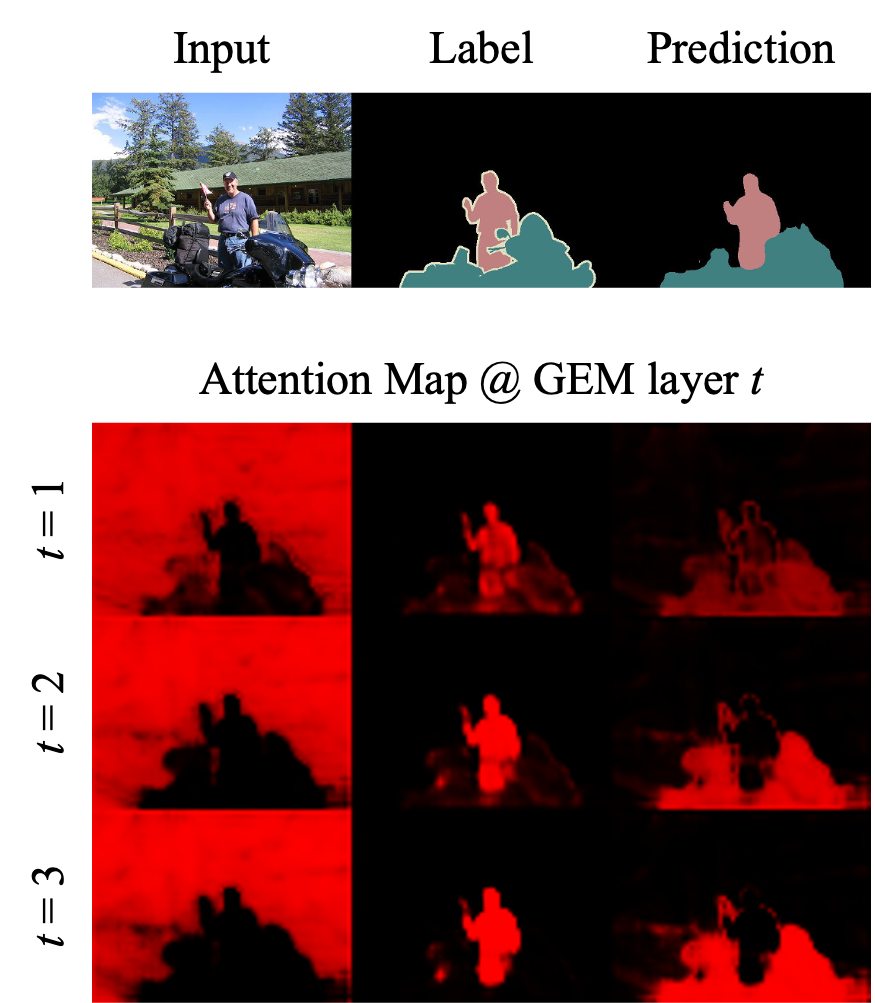
Chonghyuk Song, Eunseok Kim, Inwook Shim AAAI, 2021 paper Replacing unrolled expectation maximization (EM) layers in neural networks with generalized EM layers based on the Newton-Rahpson method introduces highway connections, resulting in improved gradient flow during backpropagation. |
|
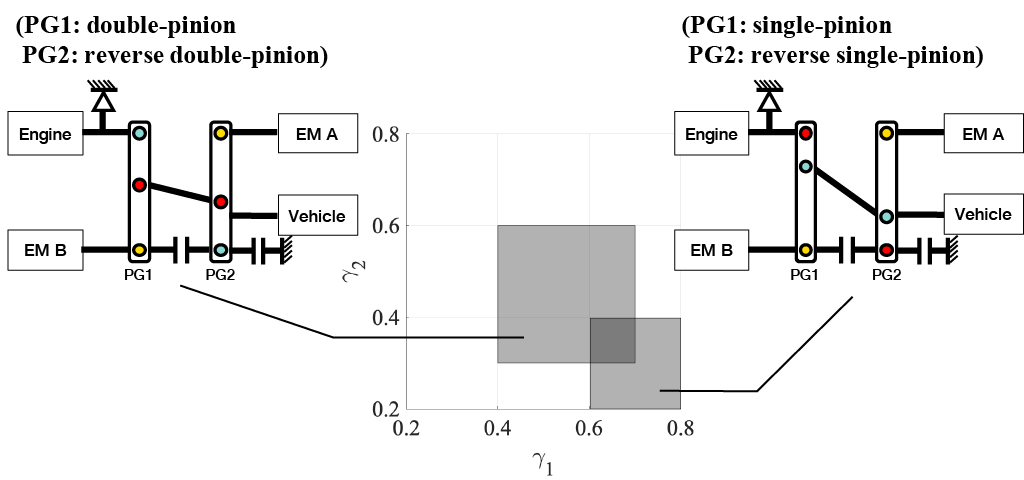
Chonghyuk Song, Jaeho Hwang, Dongsuk Kum IEEE TITS, 2020 paper A highly efficient design methodology that finds the optimal multi-mode, two-planetary-gear powertrain by leveraging the virtual lever, a modeling tool that eliminates the redundancy in the physical design space. |
|
Credits to Jon Barron for this website's template. |